Proposal from
Barney Townsend (GBR)
Proposal title
14 Sec. 10 Annex 4 Precision Wing Control - ground handling
Existing text
None
New text
S10 A4 3.C15
PRECISION WING CONTROL - GROUND HANDLING
Objective
Land and display precise control of the wing before taking off again.
Description 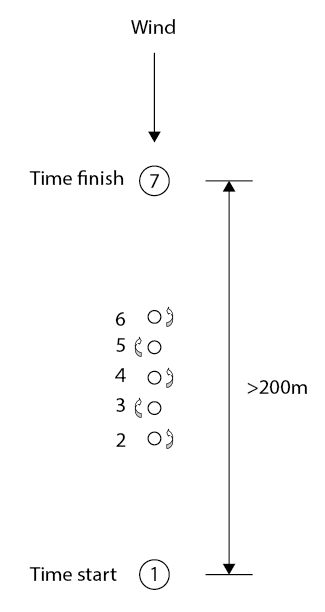
A straight course consisting of two sticks is laid out facing approximately into wind. The precise distance between the sticks is arbitrary but they should be a minimum of 200m apart.
At the center point between the sticks a minimum of five pins are placed in line with the sticks, 2m apart from each other. The pins are small plastic cones of the type used in sports training.
The pilot enters the course into wind. They must kick the first stick to start their time. They must then land before the first pin, keeping the wing flying in the air above them.
Whilst kiting the wing, they should walk or run through the course of pins, turning in alternate directions around each one to follow a slalom course. The body of the pilot must be clearly observed to pass outside of the line of pins when making each turn, and they must not touch any of the pins.
After the pilots has passed the final pin, they will then launch as quickly as possible and kick the second stick to stop the timer.
Special rules
- A valid strike on a stick is:
EITHER one where the pilot or any part of the Paramotor has been clearly observed to touch it.
OR when electronic ‘kick stick’ sensors which have been shown to meet the standard tests are used, a valid strike is one which is recorded by the device.
- The clock starts the moment the pilot kicks the first stick and stops the moment he kicks the second stick.
- The pilot may have 3 attempts at kicking each stick.
- The pilot may turn either to the left or to the right when rounding the first of the pins, so long as they alternate the turn direction on each subsequent pin.
- If the wing drops to the ground whilst the pilot is running through the slalom course they may relaunch it as many times as they need within the specified time limit.
- The maximum time allowed for a pilot to complete the course is 3 minutes
- Each pin that is touched by the body of the pilot in the course counts as a missed target.
- Each time the pilot fails to turn outside the line of pins it counts as a missed target.
Scoring
tpen: = t_pil + m * v_pen
Q: = (Tbest/Tpen)
Where
tpil = the measured pilots time (seconds)
m = the number of missed targets
vpen = the time penalty for each missed target (seconds)
tpen = the pilots time (after penalties for missed targets)
tbest = the best time (after penalties for missed targets)
Q = the task value before normalization
Reason
We need more options for tasks that offer pilots the chance to demonstrate precision skills without the requirement for high speed and high energy turns in order to make precision tasks safer in classic competitions.
This task has been tested in UK championships in 2014 and proved to work well in windy conditions.
Precise ground handling of a wing is an essential pilot skill and this task measures that ability.
This is also a good task for spectators to watch.